Introduction of Dijkstra's algorithm
What is Dijkstra's algorithm ?
Dijkstra's algorithm is an algorithm for finding the shortest path from source node to all other nodes in a weighted graph. that's why we called this algorithm as a Single Source Shortest Path.
weights should be non-negative otherwise it will create a negative weight cycle which in turns produce the infinite loop
Example
Lets take a weighted and undirected graph for illustration
Graph Representation
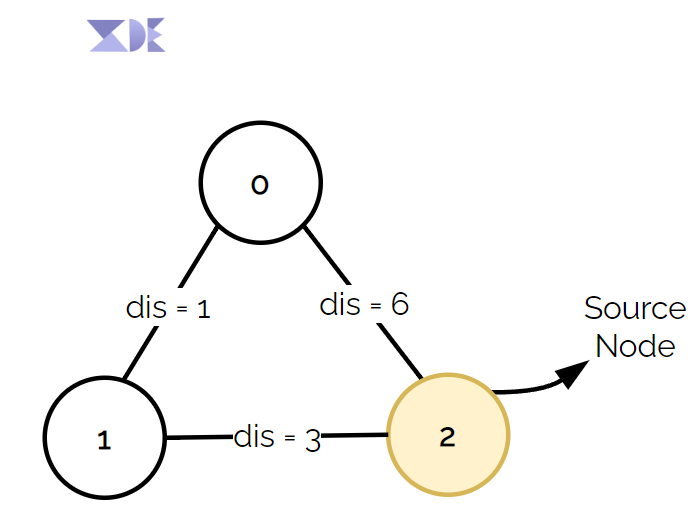
Input:
V(Vertex) = 3 , E(Edges) = 3 , S(Source) = 2
edges[][] = [ [0,1,1] , [1,2,3] , [0,2,6] ]
Output:
dis[] -> [4 , 3 , 0]
index -> [0 , 1 , 2]
edges[i] = [u,v,w], where u and v are nodes and w is distance between u and v.
dis[i] = distancebetween nodei and source node
Convert input edges into adjacency list
generally in problem solving questions related to graph we are provided the edges in the input, but that's not the actual representation of graph.
actual representation of graph is adjacency list or adjacency matrix.
hence we need to convert input edges into adjacency list.
Working of Algorithm
- mark the distance to each node as
infinity, except for the source node, which is marked as0. - Start from the
source nodeand mark it ascurrent nodeand enter it into min heap priority queue. - pull the
nodefrom min heap priority queue- calculate the
distanceto that neighbor using distance upto current node + distance from current to neighbor node - If this
distanceis less than theneighbor's current distance, update the neighbor's distance and put it into min heap priority queue.
- calculate the
- repeat
step 3until we havenodein min heap priority queue
Intution of Algorithm
We use a min heap priority queue because it allows us to efficiently access the vertex with the smallest distance from the source vertex.
In the context of Dijkstra's algorithm, we can store each vertex in the min heap priority queue along with its current distance from the source vertex.
By maintaining this min heap property, we ensure that the vertex with the smallest distance is always at the top of the heap, so we can easily access and explore the next vertex with the smallest distance.
You can try this at:
Code
- Java
- Python
- CPP
import java.util.*;
class Main{
// main function
public static int[] dijkstra(int V, ArrayList<ArrayList<int[]>> adj, int S)
{
int[] dis = new int[V];// distance array
// distance from source to all other nodes is infinite for now except source node
for(int i=0;i<V;i++){
if(S!=i)dis[i] = Integer.MAX_VALUE;
}
// Priority Queue to select the shortest distance first, min-heap priority queue
PriorityQueue<Node> pq = new PriorityQueue<>((a,b)->a.dis-b.dis);
pq.add(new Node(S,0));// add source node to S and dis to be 0
while(!pq.isEmpty()){
Node element = pq.poll();// poll the node
int node = element.node,wt = element.dis;
// get all the neighbour of node
ArrayList<int[]> neighbours = adj.get(node);
for (int[] neigh : neighbours) {
int neigh_node = neigh[0] , dis_from_node = neigh[1];
// if we have a path to get minimum distance
if(wt+dis_from_node < dis[neigh_node]){
dis[neigh_node] = wt+dis_from_node;
pq.add(new Node(neigh_node,dis[neigh_node]));
}
}
}
return dis;
}
public static ArrayList<ArrayList<int[]>> createGraph(int V,int E,int[][] edges){
ArrayList<ArrayList<int[]>> adj = new ArrayList<>();
// there are V nodes
for(int i=0;i<V;i++){
adj.add(new ArrayList<>());
}
// iterate through all the edges
for(int i=0;i<E;i++){
int[] edge = edges[i];
int u = edge[0],v = edge[1],w = edge[2];
adj.get(u).add(new int[]{v,w});// connect u to v with weight w
adj.get(v).add(new int[]{u,w});// connect v to u with weight w
}
return adj;
}
public static void main(String args[]){
// input section
int V = 3,E = 3,S = 2;// V is number of nodes and E is number of edges, S is source node
int[][] edges = {{0,1,1},{1,2,3},{0,2,6}};// each array consists of {u,v,w}
ArrayList<ArrayList<int[]>> adj = createGraph(V,E,edges);
int[] res = dijkstra(V, adj, S);
// print output
for(int r: res)System.out.print(r+" ");
}
}
class Node{
int node, dis;
Node(int _node,int _dis){
this.node = _node;
this.dis = _dis;
}
}
import heapq
class Node:
def __init__(self, node, dis):
self.node = node
self.dis = dis
def __lt__(self, other):
return self.dis < other.dis
def dijkstra(V, adj, S):
dis = [float('inf')] * V # distance array
dis[S] = 0 # distance from source to itself is 0
pq = [] # Priority Queue to select the shortest distance first
heapq.heappush(pq, Node(S, 0)) # add source node to S and dis to be 0
while pq:
element = heapq.heappop(pq) # pop the node
node, wt = element.node, element.dis
# get all the neighbors of node
neighbors = adj[node]
for neigh in neighbors:
neigh_node, dis_from_node = neigh[0], neigh[1]
# if we have a path to get a minimum distance
if wt + dis_from_node < dis[neigh_node]:
dis[neigh_node] = wt + dis_from_node
heapq.heappush(pq, Node(neigh_node, dis[neigh_node]))
return dis
def createGraph(V, E, edges):
adj = [[] for _ in range(V)] # create adjacency list
for edge in edges:
u, v, w = edge
adj[u].append([v, w]) # connect u to v with weight w
adj[v].append([u, w]) # connect v to u with weight w
return adj
# input section
V, E, S = 3, 3, 2 # V is number of nodes, E is number of edges, S is source node
edges = [[0, 1, 1], [1, 2, 3], [0, 2, 6]] # each array consists of [u, v, w]
adj = createGraph(V, E, edges)
res = dijkstra(V, adj, S)
# print output
print(res)
#include <iostream>
#include <vector>
#include <queue>
#include <climits>
#include <functional>
using namespace std;
struct Node {
int node, dis;
Node(int _node, int _dis) : node(_node), dis(_dis) {}
};
vector<int> dijkstra(int V, vector<vector<pair<int, int>>>& adj, int S) {
vector<int> dis(V, INT_MAX); // distance array
dis[S] = 0; // distance from source to itself is 0
priority_queue<Node, vector<Node>, function<bool(Node, Node)>> pq([](Node a, Node b) { return a.dis > b.dis; }); // min-heap priority queue
pq.push(Node(S, 0)); // add source node to S and dis to be 0
while (!pq.empty()) {
Node element = pq.top(); // get the node with the minimum distance
pq.pop();
int node = element.node, wt = element.dis;
// get all the neighbors of node
vector<pair<int, int>>& neighbors = adj[node];
for (pair<int, int>& neigh : neighbors) {
int neigh_node = neigh.first, dis_from_node = neigh.second;
// if we have a path to get a minimum distance
if (wt + dis_from_node < dis[neigh_node]) {
dis[neigh_node] = wt + dis_from_node;
pq.push(Node(neigh_node, dis[neigh_node]));
}
}
}
return dis;
}
vector<vector<pair<int, int>>> createGraph(int V, int E, vector<vector<int>>& edges) {
vector<vector<pair<int, int>>> adj(V); // create adjacency list
for (vector<int>& edge : edges) {
int u = edge[0], v = edge[1], w = edge[2];
adj[u].push_back({ v, w }); // connect u to v with weight w
adj[v].push_back({ u, w }); // connect v to u with weight w
}
return adj;
}
int main() {
// input section
int V = 3, E = 3, S = 2; // V is number of nodes, E is number of edges, S is source node
vector<vector<int>> edges = { {0, 1, 1}, {1, 2, 3}, {0, 2, 6} }; // each array consists of {u, v, w}
vector<vector<pair<int, int>>> adj = createGraph(V, E, edges);
vector<int> res = dijkstra(V, adj, S);
// print output
for (int r : res) {
cout << r << " ";
}
cout << endl;
return 0;
}
Complexity
Time Complexity:
O(Vlog(V) + E)
Space Complexity:
O(V + E)
V denotes number of Vertex/Nodes and E denotes number of Edges in a Graph.